RESPLE Demonstrator: Handheld mobile mapping using RESPLE
Download data RUG_BB (Password: RESPLE2025) and run the example above yourself:
ros2 launch resple resple_demonstrator.launch.py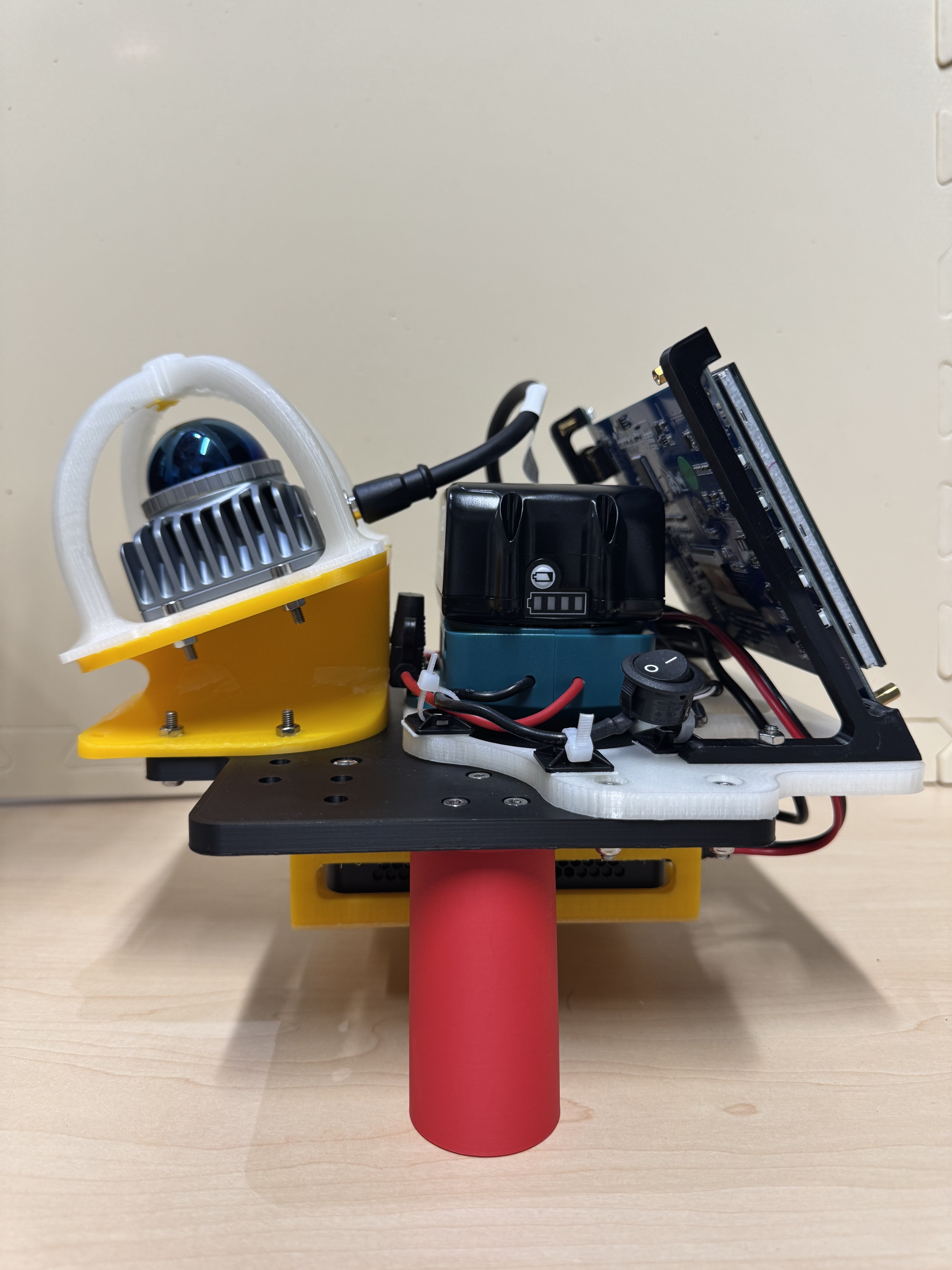


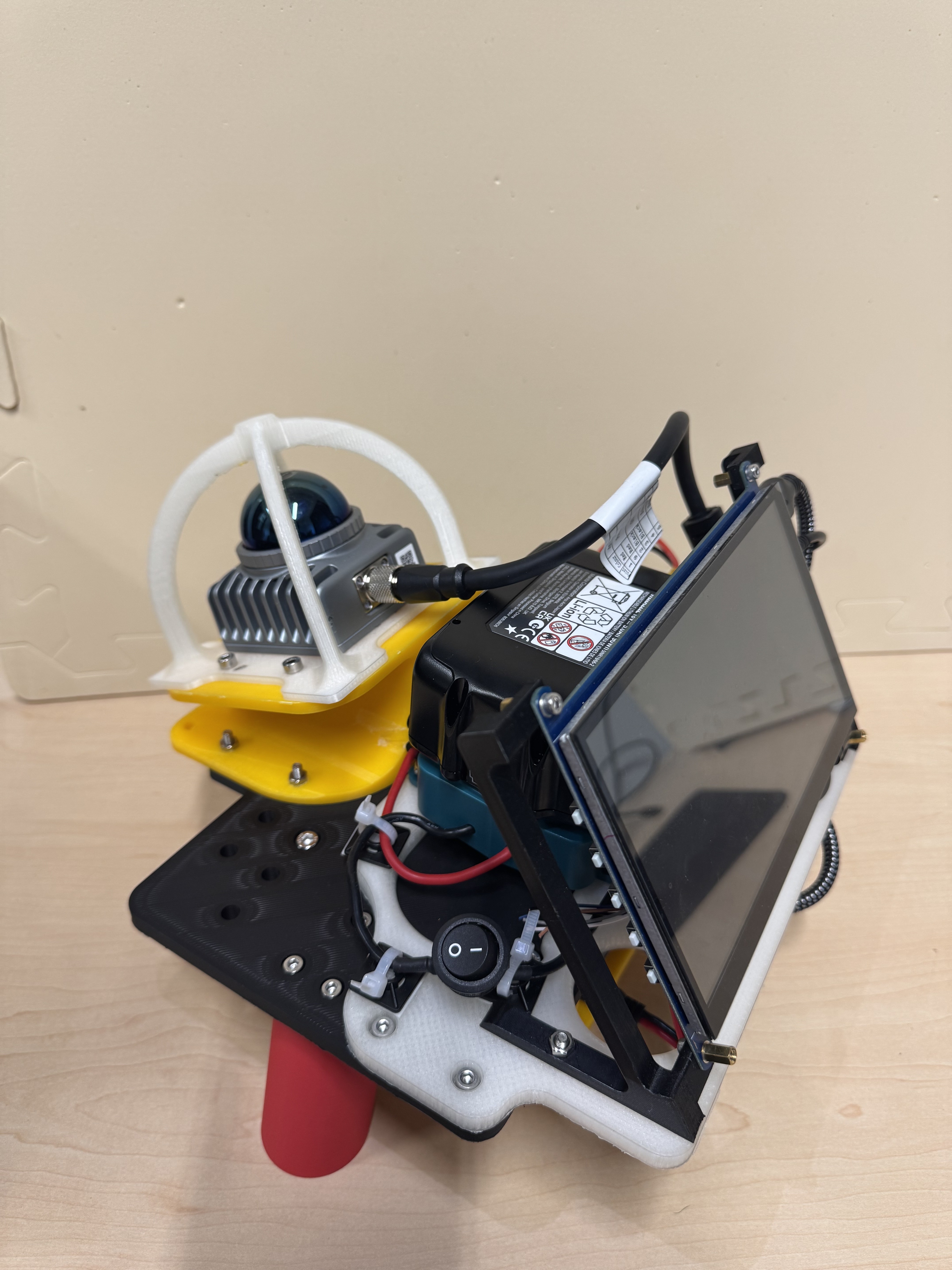

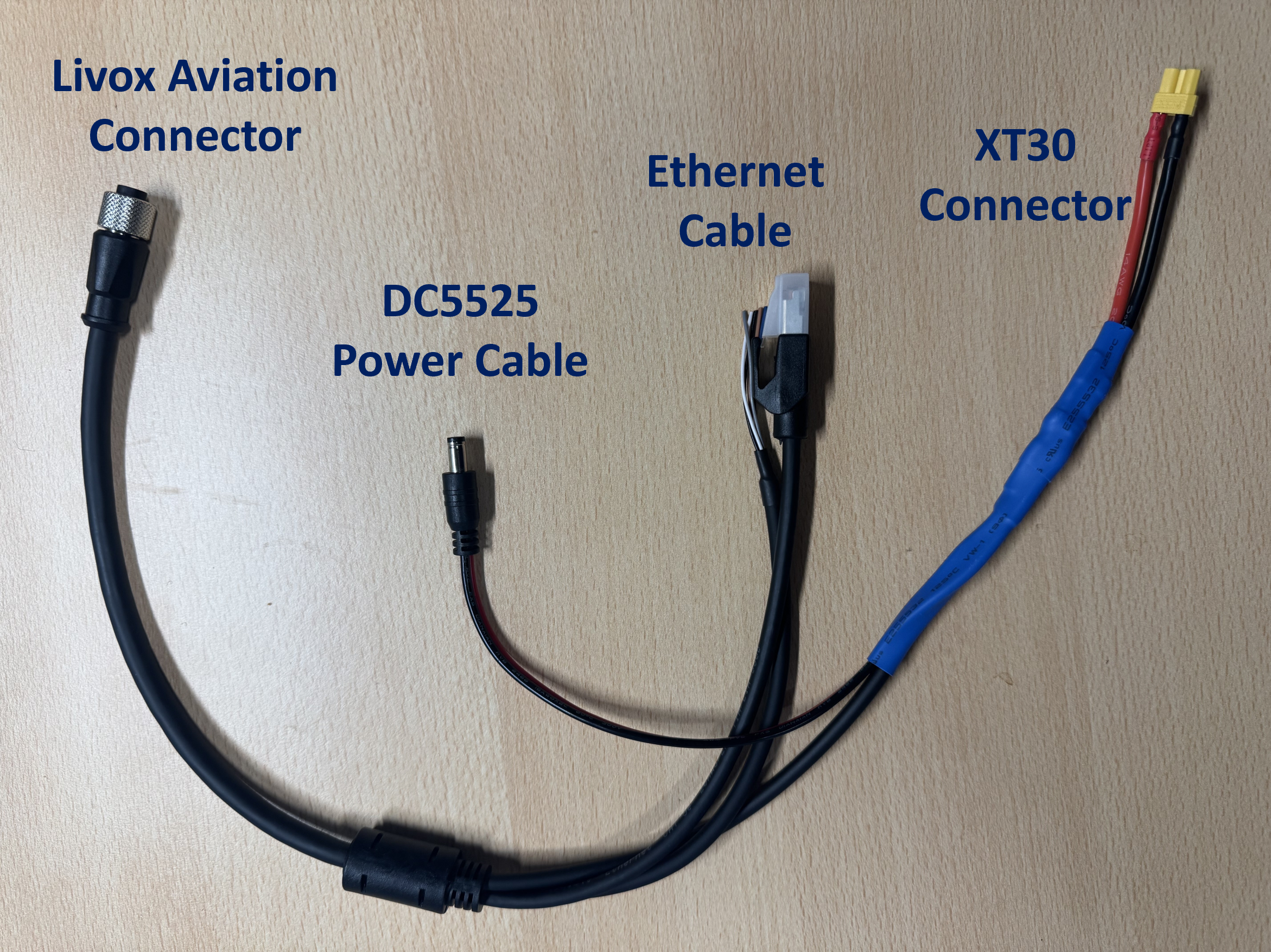
Wiring
Citation
@article{cao2025resple,
author={Cao, Ziyu and Talbot, William and Li, Kailai},
title={RESPLE: Recursive Spline Estimation for LiDAR-Based Odometry},
journal={IEEE Robotics and Automation Letters},
volume={10},
number={10},
pages={10666-10673},
year={2025}
}Acknowledgement
The project is partially supported by the Comenius programme Teaching Fellows 2025 under this project (PI: Kailai Li). Kailai Li led the whole design, manufacturing and testing of the hardware-software system. We would like to acknowledge contributions from Ella Yixuan Qiu, Ziyu Cao, Kees Wierenga, Shady Gmira and Qihao Yuan for their contributions on the CAD design. Particularly, for CAD, we acknowledge Ella's effort on designing the whole setup and Shady's initial version of the screen holder, main plate and a computer holder. The whole demonstrator was heavily inspired and essentially a customization of the works by Ji Zhang and Jiarong Lin.