TudoRun Dataset
The TudoRun (Tudor Run) dataset consists of 8 sequences. A Livox Mid360 is mounted on a Unitree Go2 quadruped robot operated indoor with dynamic motions.
The first 3 sequences (TudoRun01-03) are recorded within a test field of about 10m × 4m covered by a motion capture system combining 8 Qualisys Miqus M3 cameras.
The remaining 5 sequences (TudoRun04-08) started and ended in this test field but included more movements in a larger adjacent hall (no motion capturing).
Ground truth was recorded only within this test field using the motion capture system with passive markers.
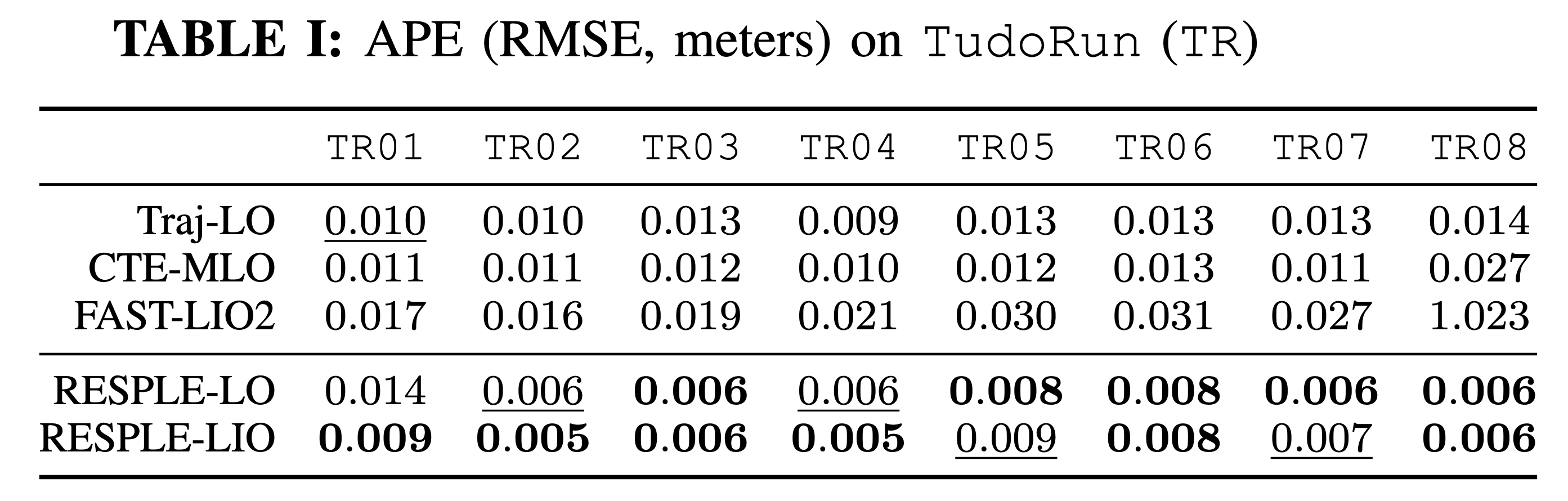
The TudoRun dataset serves as a supplementary dataset for RESPLE and was not included for evaluation in the original paper. Therefore, we provide the
results above for comparision with a few representative LO or LIO systems.